MPU6050 DMP6 ImuData for ROS
Materials
AMB82-mini x 1
MPU6050 x 1
Example
Introduction
This example will demonstrate getting the data from MPU6050 with DMP6. MPU6050 is equipped with a Digital Motion Processor (DMP) to handle the calculations of motion algorithms such as conversion to 3-axis yaw/pitch/roll of planes, conversion to quaternion, or conversion to Euler angle. In addition, this example will calculate world-frame acceleration, adjusted to remove gravity, and rotated based on known orientation from quaternion.
Procedure
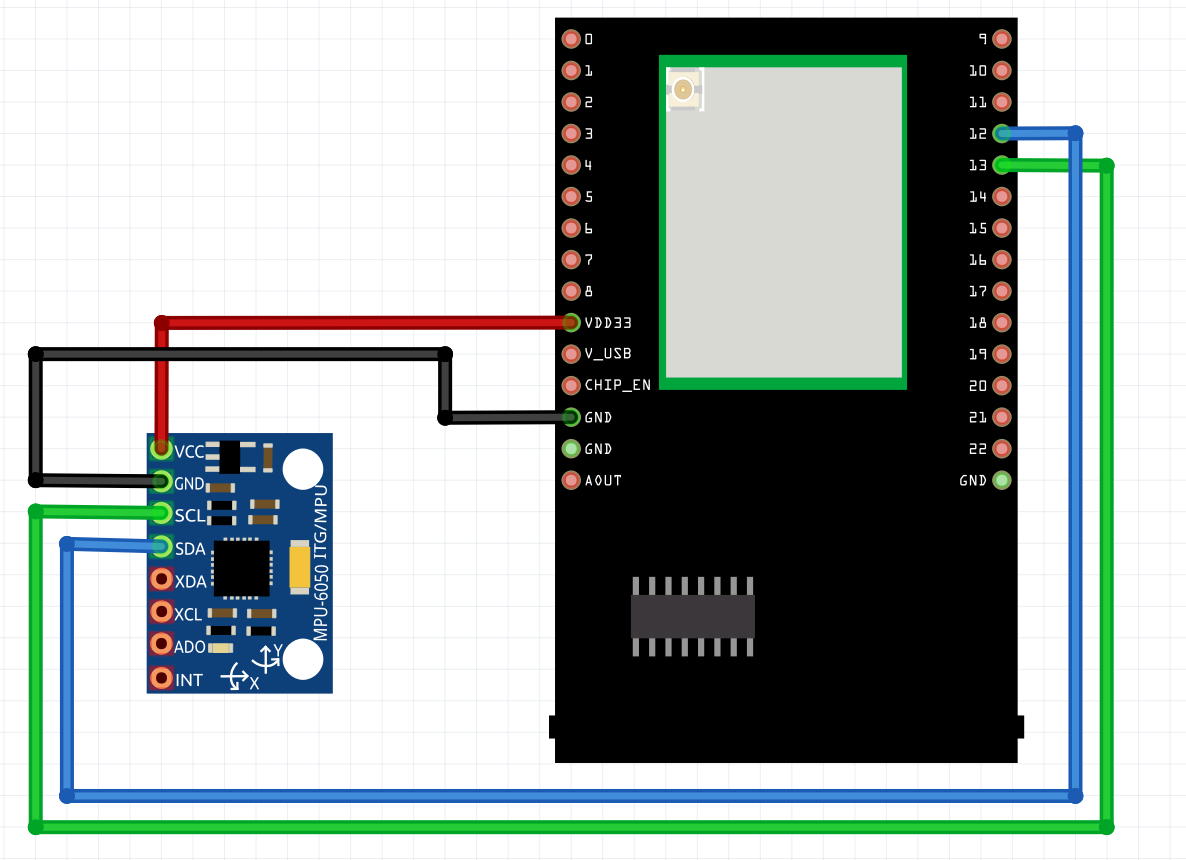
Connect the MPU6050 to I2C_SDA and I2C_SCL of the board as shown in the diagram below.
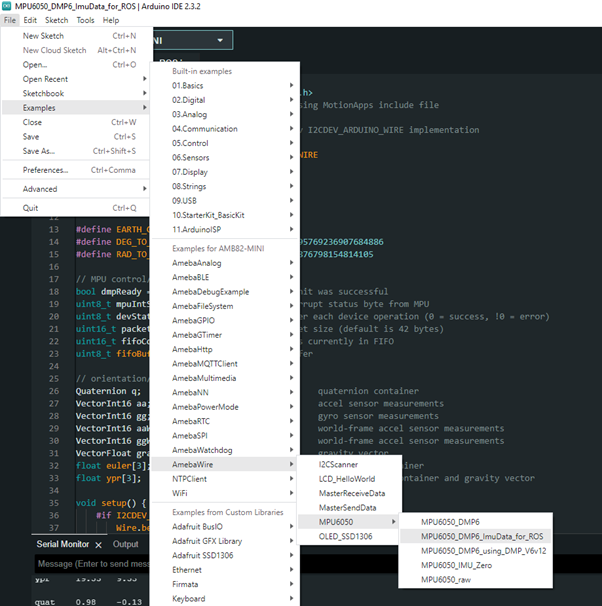
Open the example in “File” -> “Examples” -> “AmebaWire” -> “MPU6050”-> “MPU6050_DMP6_ImuData_for_ROS.ino”.
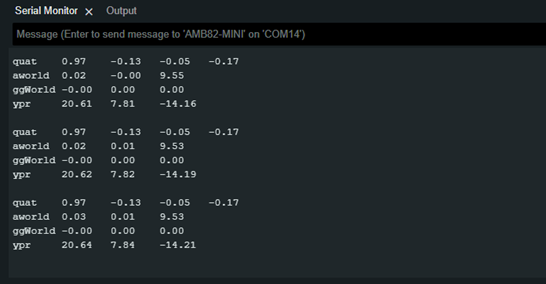
Compile and run the example. In the Serial Monitor, you should be able to see the output of quaternion, world-frame acceleration, world-frame gyro values and yaw/pitch/roll values.